

为了从太阳能电池板或阵列提供最大功率,独立逆变器和并网逆变器使用复杂的策略来找到给定条件下的最大功率点或MPP,他们通过改变太阳能电池板或阵列上的负载来做到这一点,直到它在电池板或阵列的IV曲线上找到将提供最大功率的点,然后逆变器将此直流电转换为交流电,然后在本地使用或馈入电网。
确定逆变器完成这项任务的程度非常重要。项目的可行性可能取决于逆变器是否如制造商或分销商所说的那样高效。即使是几个百分点的差异也可能导致项目不经济,最坏的情况可能会导致诉讼。
为了有效测试光伏逆变器的效率,您需要一个太阳能电池阵列模拟器,它既能准确模拟太阳能电池板或阵列的输出,又能提供特定应用所需的输出功率。使用实际的太阳能电池板或阵列是不切实际的,因为将它们的输出控制到模拟所有条件所需的程度是不可行的。
太阳能电池阵列模拟器如何有效测试逆变器?
为了模拟太阳能电池板或阵列,逆变器设计人员和制造商使用现代数字控制电源。当与复杂的控制软件结合使用时,这些系统可以模拟高达 1 MW 的太阳能电池板阵列。
准确模拟太阳能电池阵列以测试逆变器可能是一个相当大的挑战。如前所述,逆变器不断改变其输出阻抗,寻找最大功率点。模拟器必须像太阳能电池阵列一样响应这些负载变化。模拟器不仅必须保持其功率输出,还必须跟踪所模拟的太阳能电池板或阵列的 IV 曲线。
更复杂的是,许多太阳能逆变器在其连接到光伏阵列的直流输入上产生交流纹波。对于单相逆变器,此纹波的频率是线路频率的两倍(美国型号为 120 Hz)。通常,您需要电源来抑制这种纹波,但太阳能电池阵列模拟器的电源不能抑制它。
越来越多的逆变器(以及几乎所有微型逆变器)准确测量纹波电压和电流的幅度和相位,以快速确定阵列的 MPP。与传统的抖动技术(也称为扰动观察)相比,这种方法允许逆变器以更高的速度确定 MPP。在多云条件下,更快地跟踪 MPP 会导致更高的整体效率,在这种情况下,辐照度不断变化。由于最终用户对其太阳能装置的整体效率非常敏感,因此所有太阳能逆变器很可能很快就会使用这种方法。
现代太阳能电池阵列模拟器的另一个要求是灵活性。市场上有许多不同类型的太阳能电池板和太阳能电池板,每种都有自己的特点。现代太阳能电池阵列模拟器必须是可编程的,以允许他们确定逆变器设计将如何与所有这些不同类型的太阳能电池阵列配合使用。
最后,太阳能电池阵列模拟器需要测量和记录逆变器的交流输出,并将该数据与直流电源输入相关联。这关闭了测试回路,并允许您确定逆变器设计的实际效率。
保持曲线
为了执行准确的测试,太阳能电池阵列模拟器的输出必须忠实地遵循太阳能电池阵列或太阳能电池板的 IV 曲线。也就是说,它必须像太阳能电池阵列一样响应被测逆变器施加的不断变化的负载条件。为了评估模拟器的性能,您需要考虑三个参数:输出噪声电流、输出电压和电流之间的相位误差以及 MPP 跟踪精度。
过大的输出噪声电流会使逆变器很难甚至不可能找到最大功率点,这将导致测试问题。
由于噪声水平而导致的无法操作点是逆变器本身的功能。任何 PV 模拟器产生的噪声主要由其内部电源开关噪声及其相关谐波组成。由于逆变器和光伏模拟器都有控制回路,因此可能存在交互作用。从逆变器设计的角度来看,逆变器设计工程师正在努力设计一款具有成本效益的高性能逆变器。由于实际的太阳能电池板不会产生任何噪音,因此工程师不太可能增加过滤和相关成本。噪音水平真的很关键;70ma 与 700ma 当然是一个数量级,可能对某些逆变器至关重要,而对其他逆变器则不是那么重要。然而,我们已经看到逆变器设计正在减少现有电路以支持降低成本的趋势。
在现实世界中,太阳能电池板或阵列的输出电压和输出电流之间基本上存在零相位差,即使逆变器使用 MPP 跟踪策略来非常快速地改变负载。因此,为了准确模拟太阳能电池板或阵列,即使负载变化如此之快,模拟器的相位误差也必须小于 15 度。许多模拟器无法做到这一点,因此它们不适合测试那些使用高扫描频率的逆变器。
在极端情况下,当输出电压和输出电流之间的相位误差接近 +/- 90 度时,被测逆变器实际上会开始以错误的方向寻找 MPP 并变得不稳定。对于显着的相位误差,即使逆变器稳定,它也会锁定到不是 MPP 的曲线位置。误差量与相位误差成正比。我们已经在使用快速 MPP 跟踪算法的微型逆变器和住宅逆变器上观察到这种行为。
另一个重要规格是最大功率点动态跟踪精度。这是衡量模拟器在动态条件下偏离编程 IV 曲线的程度的指标,在这种情况下,许多因素都会导致这种不准确。
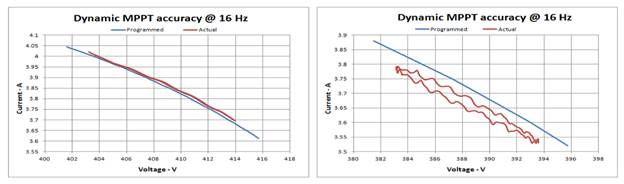
图 yy(上图)显示了目前市场上两种模拟器的动态 MPP 跟踪精度的比较。该测试使用16Hz的测试频率来模拟逆变器的负载效果。红线显示模拟器的理想响应,而蓝线显示实际响应。如您所见,两个模拟器之间存在相当大的差异,并且随着抖动频率的增加,差异甚至更大。






